데이터 기반 로봇 매니퓰레이터 제어 관련 기술동향
A Survey on Data-Driven Control in Robot Manipulators
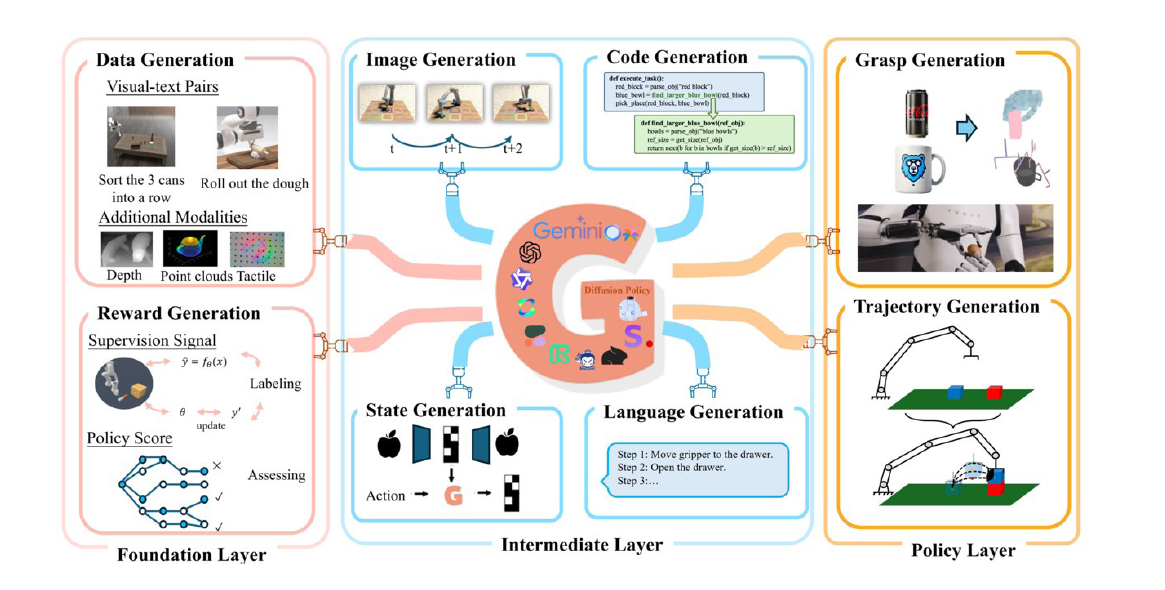
로봇 조작을 위한 생성형 AI의 계층적 구조
박준민 | 충남대학교
Park JunMin | Chungnam national university
요약
본 기고문은 제조 환경에서 요구되는 유연성, 적응성, 그리고 정밀 제어 성능 향상 요구에 대응하기 위해 데이터 기반 접근법을 적용한 로봇 매니퓰레이터 제어 연구 동향을 분석하였다. 기존의 모델 기반 제어 방식은 구조화된 환경에서는 높은 성능을 제공하나, 비정형 작업, 접촉 기반 조작, 센서 노이즈, 모델 불확실성과 같은 복잡한 상호작용이 존재하는 실제 산업 환경에서는 제약이 존재한다. 이러한 한계를 극복하기 위해 데이터 기반 모델 학습, Koopman 연산자 기반 선형화, 강화학습 기반 제어 정책 학습, 그리고 데이터 기반 모델 예측 제어(Data-Driven Model Predictive Control, DD-MPC) 등이 연구되고 있다.
Abstract
This study reviews recent advances in data-driven control strategies for robot manipulators in response to the growing need for flexibility, adaptability, and high-precision operation in modern manufacturing. For robot manipulators, traditional control methods remain effective in structured environments; however, its applicability diminishes in real-world scenarios characterized by unstructured tasks, contact interactions, sensor noise, and model uncertainties. To overcome these limitations, data-driven methods including Koopman operator-based linearization, reinforcement learning, and Data-Driven Model Predictive Control (DD-MPC) have been deeply investigated.
(06130) 서울시 강남구 테헤란로7길 22(역삼1동 635-4) 과학기술회관 1관 901호
사업자등록번호 : 220-82-01690 / 대표 : 박종배
COPYRIGHT ⓒ KIEE ALL RIGHTS RESERVED.